全國(guó)咨詢熱線:
全國(guó)咨詢熱線:
+86 158-1184-4241
+86 158-1184-4241
news information
Product center

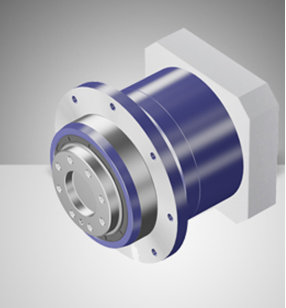
PLE系列精密行星減速機(jī)
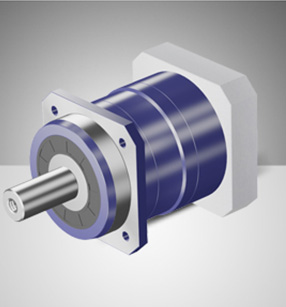
PLFK系列行星減速機(jī)

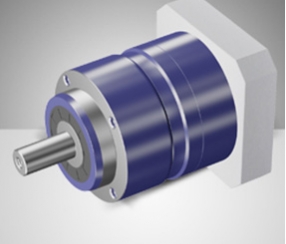
ZPT系列行星減速機(jī)

ZPLF系列精密行星減速機(jī)

PLH系列精密行星減速機(jī)
AL系列精密行星減速機(jī)

VLF078系列精密行星減速機(jī)
AF系列精密行星減速機(jī)
Contact us

首頁(yè)
發(fā)布時(shí)間:2021-05-19 閱讀量:
備案號(hào):粵ICP備17125794號(hào)-2
 公司地址:深圳市寶安區(qū)西鄉(xiāng)鎮(zhèn)鶴洲南片工業(yè)區(qū)陽(yáng)光工業(yè)園B2棟3樓
公司地址:深圳市寶安區(qū)西鄉(xiāng)鎮(zhèn)鶴洲南片工業(yè)區(qū)陽(yáng)光工業(yè)園B2棟3樓
 電話:+86-0755-27892991
電話:+86-0755-27892991
 郵箱:2355384836@qq.com
郵箱:2355384836@qq.com
 版權(quán)所有:深圳市鵬輝科技有限公司
版權(quán)所有:深圳市鵬輝科技有限公司

官方微信公眾號(hào)